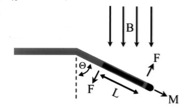
The catheter used for magnetic guidance are special catheter, they have a magnetic tip that is moved by changing the external magnetic field. In the figure below a schematic of the catheter tip in the magnetic field is represented and the equations for torque are reported.
The deflection of the catheter is given by the torque exerted by the magnetic field (B) to the permanent magnet (M) on the catheter tip. The force is given by the product of the permanent magnet, cross-sectional area (A) of the catheter, magnetic field and sin of the angle between magnetic field and catheter. Therefore varying the direction and the intensity of the external magnetic field the catheter is deflected and moved.
A full range of catheter deflection can be obtained with 0.15 T magnetic field strength, the corresponding force on the catheter tip do not damage endocardial surface. This has been proven in recent studies.
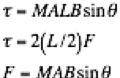
Different kind of catheter have been developed,
the first generation with one permanent magnet,
then bipolar 3 magnet tip both have 4 mm
solid tip and a single ring electrode
and third generation: quadripolar 3 magnet tip
4 mm solid tip with 2 additional ring electrodes.
All catheters are extremely soft and flexible,
lacking the pull wire mechanism of conventional
steerable catheters. The more magnets there are
on the tip the more precise is the guidance.
Catheter Magnetic Guidance
How does it work

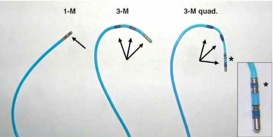

The navigation is achieved by drawing the desired magnetic field on a fluoroscopic view. Then a computer estimates the three components of the magnetic field and the currents required to the electromagnets. The magnetic force produced aligns the catheter to the magnetic field.
In the picture a physician is guiding the catheter by drawing the direction of the external magnetic field on a board.
The arrows that specify the new magnetic field are shown on the monitor on the fluoroscopic image.
The control panel can be in another room, in this way the physician would not be exposed to x-ray radiation.

{kind=link}