Stereotactic
Image Guidance in Brain Surgery
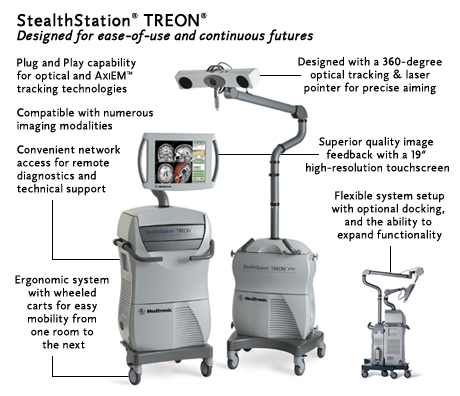
StealthStation®
The StealthStation®
TREON™ stereotactic image guidance system was designed by Medtronic for use in brain, spinal, and
ear/nose/throat surgeries. The system registers preoperative images of the patient (usually MRI and CT scans) with real-time images captured during the surgery by
integrated light emitting diode (LED) cameras.
A surgeon can choose a custom projection of the surgical area from a 3D
image set, can merge image data from multiple sources, and can control
the location of the cameras in order to
provide the best view of the surgical area.
The StealthStation® system is equipped with a powerful Linux-based software suite which facilitates loading and analyzing of preoperative diagnostic scans of the patient, and allows to map the
safest and least invasive 3D path to the target site in the patient’s
body.
During a surgery, the system
acquires real-time images of the operation from various angles, and
registers the position of surgical instruments relative to preoperative
image set, allowing surgeon to navigate around critical and
hard-to-reach surgical areas without
disturbing the surrounding structures. In neurosurgery, the system provides access to individual anatomical details of patient’s brain, and to precise location of lesion or tumor obtained from comprehensive diagnostics data.
Earlier versions of
stereotactical guidance systems required the use of specialized
surgical instruments equipped with markers that would allow them to be
registered by a tracking system. The StealthStation system accommodates
for
standard surgical instruments, rendering the image of an
instrument within the images of the patient’s anatomy. A
surgeon can precisely track the position and the angle of the instrument in real-time on the monitor.
Future directions and challenges for biomedical engineering in this area may include:
- Robotic integration. StealthStation is not a robotic system - a
surgeon holds and directs surgical instruments. There are endless
opportunities for robotic design, and future systems may integrate
stereotactic image guidance with robotic manipulation.
- Integration with intra-operative imaging. The brain
matter has gel-like properties, so brain anatomical landmarks
may change in shape and location during open cranial surgery.
Updating preoperative image sets with data from real-time
intraoperative imaging could enhance the precision of guidance.




