Most stereotactically guided robots are actually guided based on data collected from either CT or MRI scans.
The difference between these systems and the majority of the systems described in the sections devoted to
MR and CT guided robots is that stereotactically guided robots depend on a secondary post imaging registration
process. During the initial scanning, markers are placed on the object of interest. The position of these
markers are used to align the coordinate system of the scanned object with the global coordinate system of
either an optical tracking system or a robotic workspace. Naturally, this 2 step registration process works best
for rigid structure that are unable to shift between the scanning phase and the marker identification phase. As such,
stereotactic guidance is very popular for surgeries where markers can be fixed to the skull. Since stereotactic
guidance systems require only one initial set of CT or MR images, the actual operations can be performed outside of
the scanner in a typical operating room. This flexibility has allowed a few stereotactically guided surgical robots
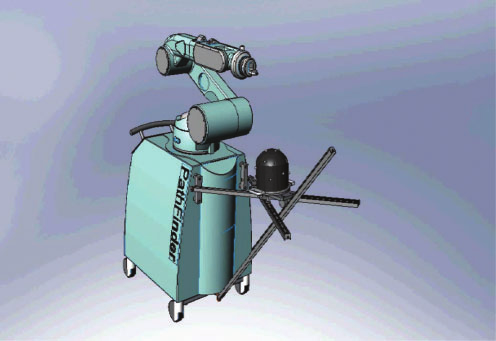
to become commercially successful. Two of the most notable stereotactically guided systems are the neuroarm and the pathfinder.
<<
Figure1: click the arrows to see additional pictures.
>>
CT guided master-slave robot designed to provide surgeons with the advantages of a 3D image guidance without exposing them to radiation. The device can be directly co registered with the CT scan, and is equipped with force sensors that are used to provide the operator with haptic feedback. Like most image guided robots, this robot was design for needle surgeries.
The NeuroArm robot has Even been used to assist is transcranial magnetic stimulation procedures.
See the attached video.
References
[1]
M.S. Eljamel, “Robotic neurological surgery applications: accuracy and consistency or pure fantasy?,” Stereotactic and Functional Neurosurgery, vol. 87, 2009, pp. 88-93.
[2]
S. Pandya, J.W. Motkoski, C. Serrano-Almeida, A.D. Greer, I. Latour, and G.R. Sutherland, “Advancing neurosurgery with image-guided robotics,” Journal of Neurosurgery, vol. 111, Dec. 2009, pp. 1141-1149.
[3]
G.R. Sutherland, I. Latour, and A.D. Greer, “Integrating an image-guided robot with intraoperative MRI: a review of the design and construction of neuroArm,” IEEE Engineering in Medicine and Biology Magazine: The Quarterly Magazine of the Engineering in Medicine & Biology Society, vol. 27, Jun. 2008, pp. 59-65.
[4]
T.R.K. Varma and P. Eldridge, “Use of the NeuroMate stereotactic robot in a frameless mode for functional neurosurgery,” The International Journal of Medical Robotics + Computer Assisted Surgery: MRCAS, vol. 2, Jun. 2006, pp. 107-113.
[5]
G. Deacon, A. Harwood, J. Holdback, D. Maiwand, M. Pearce, I. Reid, M. Street, and J. Taylor, “The Pathfinder image-guided surgical robot,” Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, vol. 224, 2010, pp. 691-713.