CT guided robots
Although MRI holds many advantages over CT imaging, CT is still the more affordable and more
common imaging modality. As such, it is no surprise that many of the same techniques designed
for MR compatible robots have been applied to CT guided robots. Like their MR compatible
counterparts, most CT guided robots are designed to assist in minimally invasive needle surgeries.
However, since CT imaging uses neither magnetic fields nor RF pulses, it is by nature more
compatible with traditional robotic devices the MR. As such, many of the devices designed for CT assisted robotic surgeries are more conventional
than their MR compatible competitors. One unique advantage of CT guided robotic devices is that
they can allow a surgeon to benefit from the rich information provided by CT scanning with having
to be exposed to the radiation associated with the scanning process. As such, Ct guided robots could
make surgery safer for both the patient and the surgeon. Figure 1 below contains images and
descriptions of a number of unique CT guided robotic systems.
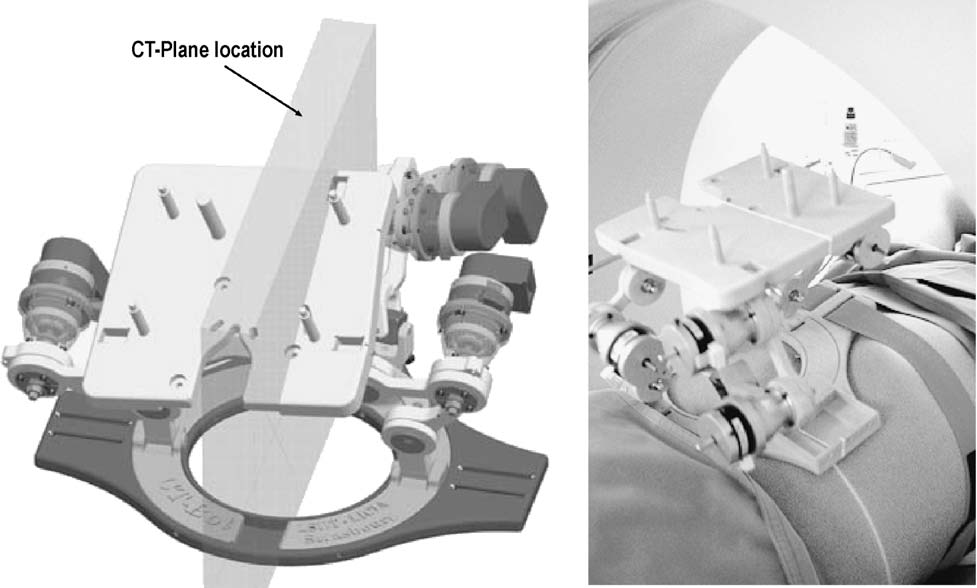
| CT guided master-slave robot designed to provide surgeons with the advantages of a 3D image guidance without exposing them to radiation. The device can be directly co registered with the CT scan, and is equipped with force sensors that are used to provide the operator with haptic feedback. Like most image guided robots, this robot was design for needle surgeries. |
References
| [1] | L.C. Ebert, W. Ptacek, S. Naether, M. Fürst, S. Ross, U. Buck, S. Weber, and M. Thali, “Virtobot--a multi-functional robotic system for 3D surface scanning and automatic post mortem biopsy,” The International Journal of Medical Robotics + Computer Assisted Surgery: MRCAS, vol. 6, Mar. 2010, pp. 18-27. |
| [2] | G. Fichtinger, T.L. DeWeese, A. Patriciu, A. Tanacs, D. Mazilu, J.H. Anderson, K. Masamune, R.H. Taylor, and D. Stoianovici, “System for robotically assisted prostate biopsy and therapy with intraoperative CT guidance,” Academic Radiology, vol. 9, Jan. 2002, pp. 60-74. |
| [3] | K. Masamune, G. Fichtinger, A. Patriciu, R.C. Susil, R.H. Taylor, L.R. Kavoussi, J.H. Anderson, I. Sakuma, T. Dohi, and D. Stoianovici, “System for robotically assisted percutaneous procedures with computed tomography guidance,” Computer Aided Surgery: Official Journal of the International Society for Computer Aided Surgery, vol. 6, 2001, pp. 370-383. |
| [4] | B. Maurin, O. Piccin, B. Bayle, J. Gangloff, M. de Mathelin, L. Soler, and A. Gangi, “A new robotic system for CT-guided percutaneous procedures with haptic feedback,” International Congress Series, vol. 1268, Jun. 2004, pp. 515-520. |
|