Computational Methods
The
finite element method has become the most widely used computational technique
in solving the governing equations (conservation of linear momentum) for
solids. However, there exist many other
computational methods besides the Galerkin finite element method. These include the subdomain method, the
finite volume method, Field/Boundary Element Method, and the meshless local
Petrov-Galerkin method. Many of the
previously mentioned computational methods are based on the weighted residuals
method (weak form) in which the weighted average of the error of the
differential equation is set to zero over the domain under study. All these methods require the use of trial
functions (to approximate the solution) as well as test functions (to form the
weight function). These functions must
satisfy certain continuity requirements, such as C0, C1,
C2, etc. For instance, if in the
differential equation, the nth derivative of the dependent variable is
present, then the trial solution’s (n-1)th derivative must be
continuous in order for it to make sense mathematically. In other words, the trial solution must be Cn-1
continuous [13].
As
mentioned earlier, many computational methods are based on the weak form
approach. For the conservation of linear
momentum (please see Solid Mechanics), the general weak form is
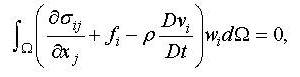
where
Ω is the domain and wi is the test (weight)
function. If the divergence theorem is
used, then this equation can be expressed as

where
Γ is the boundary and ni is the outward normal vector to the boundary
[13]. The finite element method is based
on the symmetric weak form approach. Before
these equations can be solved, the constitutive equations of the different
materials and the boundary conditions are needed. It is important to note that because of the
constitutive equation for a given material, the Cauchy stresses are actually
functions of the displacement ui. As described in the section Solid Mechanics,
the second Piola-Kirchhoff stresses Sij and Cauchy stresses σij
can be expressed as

where
Eij is the Green strain tensor and Fij is the deformation
gradient tensor [7]. Thus, the
constitutive equation for a given material can be expressed as
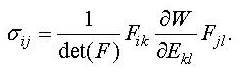
where
W is the strain energy function for a specific material. Note that the components of Fij
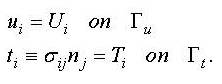
and Eij are functions of the displacement vector ui. Furthermore, the boundary conditions specified
in terms of some displacement or traction distribution on certain boundaries:
Then
the weak form can be solved by assuming some trial functions ui for
the displacement and by assuming some test functions wi. Global functions can be used, in which ui
and wi can be polynomial functions over the entire global domain of
the problem. However, this usually does
not work well, especially for global domains that have arbitrary shapes. Instead, it is easier divide up the entire
domain into very small elements (the finite elements) and use local functions
for each of these subdomains. Then the
weak form becomes

where
M is the number of sub-boundaries and N is the number of subdomains. The process of discretizing the domain into
the finite elements is known as mesh generation [5]. In each of these finite elements, element
nodal coordinates will be used as well as local basis functions (or element
basis functions). In other words, the
trial and test functions used in each subdomain are different. After assuming some form for these trial and
test functions, the task is to solve for the undetermined coefficients in each
of these local functions. This involves
the assembly of a large system of algebraic equations and then solving for all
the unknowns (undetermined coefficients) in the system [13]. There are many commercial software that can
implement the finite element method for the user; these include ABAQUS, ANSYS,
and COMSOL.