Human Walking
BME 240, Spring 2008 Leyla Esfandiari

In general, human walking consists of several sequential steps. Each of these steps is composed of two phases: the single support phase and the double support phase. During the single support phase, one leg is on the ground and the other leg is undergoing a swinging motion. The double support phase starts as soon as the swinging leg meets the ground and ends when the support leg leaves the ground.
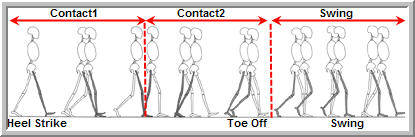
During any self selected walking, a cycle of repeated events is consistently observed. These events can be listed as 'Hill Strike' and 'Toe Off '. Since there are two extremities involved in biped walking, there are four consecutive events, foot strike, opposite toe-off, opposite foot strike and toe off.
There are two elements necessary for any form of bipedal walking regardless of the existence and the level of physical disability which are as follow:
1. Continuing ground reaction forces (GRF) that support the body
2. Periodic movement of each foot from one position of support to the other in the direction of progression
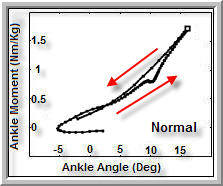
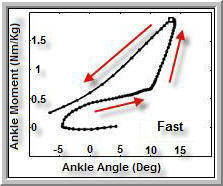
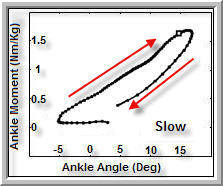
These requirements therefore should be satisfied by prosthesis or orthosis devices developed for walking assistance. To understand the relationship between ankle moments versus ankle angle a combination of ground reaction force and the periodic motion of a foot can be studied in the form of the stiffness plot of ankle joint. Studying the stiffness plots of the ankle joints at different walking speeds shows that the walking assistive device should be able to provide different stiffness during one walking cycle. It should be noticed that the stiffness at the ankle is changed as the walking speed increases. Therefore to control the stiffness of the ankle joint we need to know the state of the walking and an estimation of walking speeds.