Myoelectric Control
Basic Control Signal
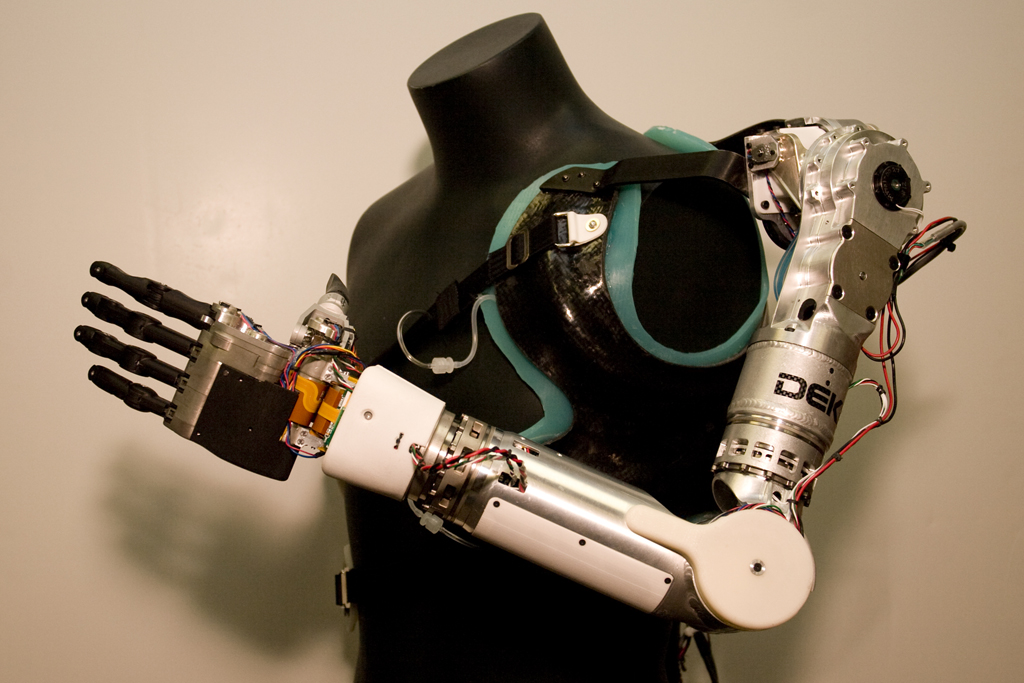
Although myoelectric prosthetics have the capability of performing a greater range of movements, the most important control signals are still the basic arm contractions. The four primary control signals used are innervated muscle contraction stimulated electromyography signals, which allow movements such as flexion and extension of the elbow and hand. Combinations of these contractions will allow for more complicated movements, simulating an actual human arm.
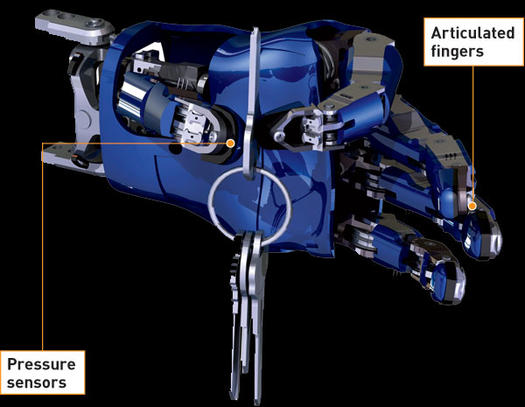
In addition to the four control signals, other signals may also be used for purposes beyond basic movements. Although they have yet to be incorporated into commercially available prosthetics, sensors that detect pressure and temperature changes can be incorporated into the outer shell that causes feedback for the patient.
Touch, Movement, and Force Sensation
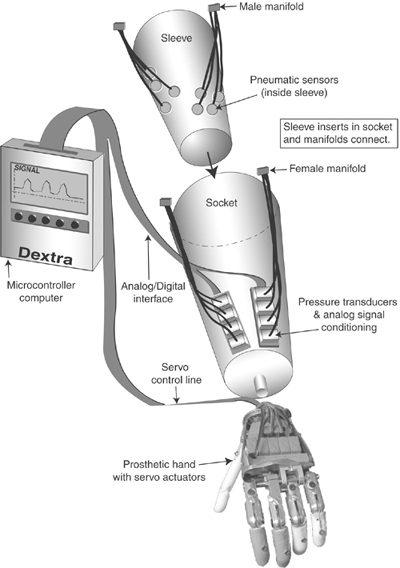
Unlike with body-powered prosthetics, where the patient can physically feel the tension in the cable pulling the system, conventional myoelectric prosthetics do not offer any sensory feedback to the user other than the weight of the object on the arm. However, it is theoretically possible to incorporate an inner array of resistive touch-based sensors underneath the outer shell of the prosthesis. Any outside force on the surface of the prosthesis will cause the inner sensors to compress, and the resistance offered by those sensors will be measured and translated into electrical impulses by electrodes in the prosthesis. A greater outside force will cause a larger indentation in the sensor array, and this will be transmitted as a greater electrical signal. Upon the removal of the outside force, the sensors will return to their normal distance and resistance, thus ending the electrical transmission. The electrical signal generated by the electrodes is transmitted to touch receptors near the innervated muscles to create the sensation of touch. This effectively allows the patient to feel to a certain degree what the prosthesis is touching.
The same concept is applied for force sensation, with a greater external force causing a larger indentation in pressure sensors in the prosthetic arm, which is then translated into an electrical signal and transmitted to pressure receptors near the muscles. A larger electrical signal will generate a greater reaction in the muscle, allowing the patients to feel as if they were applying more force on the object.
Lastly, movements of the prosthesis can be sensed by the patient using similar electrical signals that causes feedback in the residual muscle fibers. When the patient moves the prosthetic arm, the degree of contraction is measure and an electrical signal is generated and amplified. The signal is then transmitted to nerve endings of the muscles that control those specific movements, causing the fibers to contract as though it was moving a real arm. The force of the contraction depends on the amplitude of the electrical signal, which in turn depends on the movements of the prosthetic arm.